System Pipeline
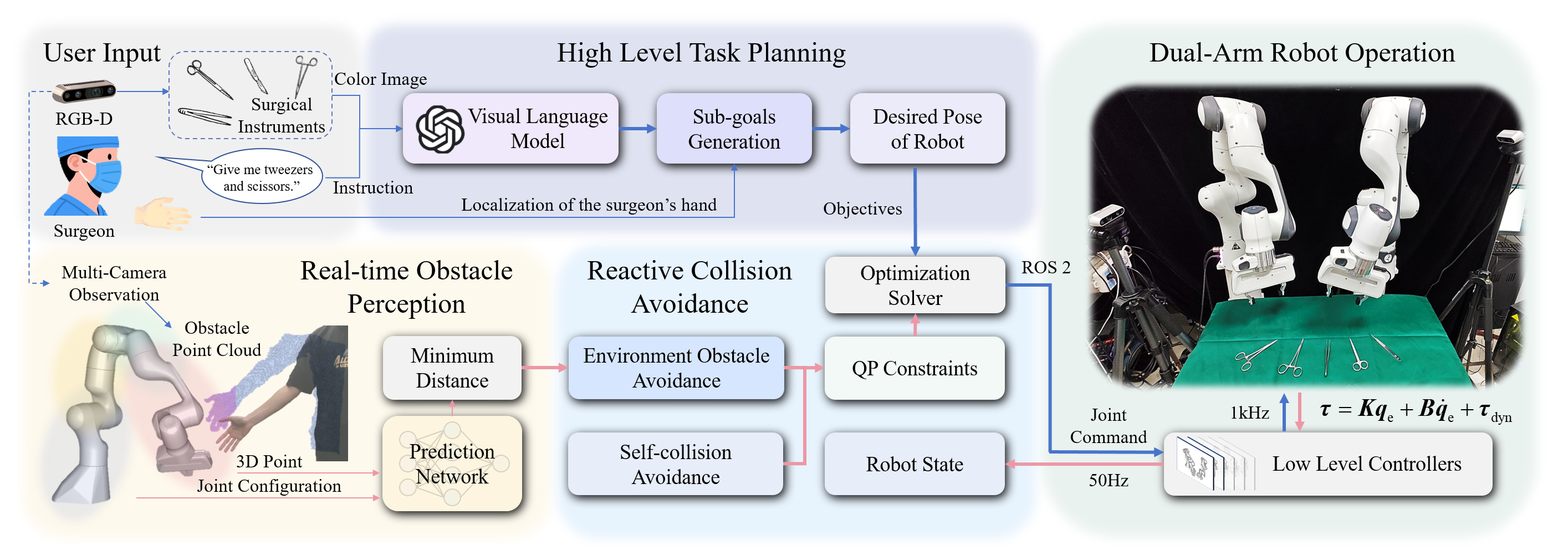
The pipeline of the collision-free dual-arm surgical assistive robot for instrument delivery. The robot system receives multi-modal inputs from the physical world (i.e., surgeon instruction, color image, depth data). The real-time obstacle perception module computes the minimum distance between robot and environmental obstacles. The QP framework is built upon the minimum distance, ensuring the dual-arm robot's collision-free operation. The high-level task planning utilizes VLM to generate the desired motion objectives for the QP framework.
Experimental Results
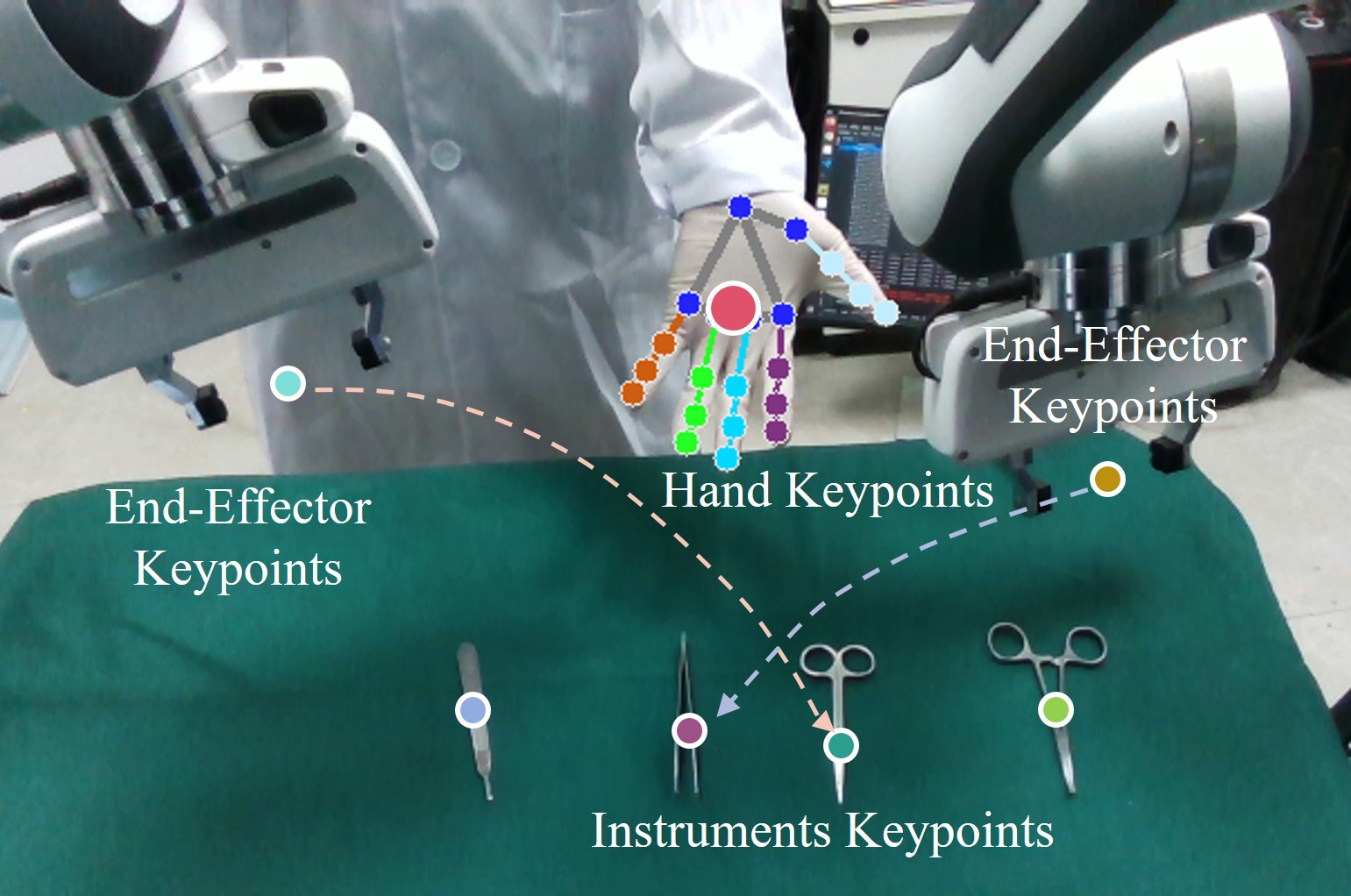
The keypoints in the experimental process. They represent the 3D positions of the corresponding objects. The arrows indicate the sub-goals of the robot.
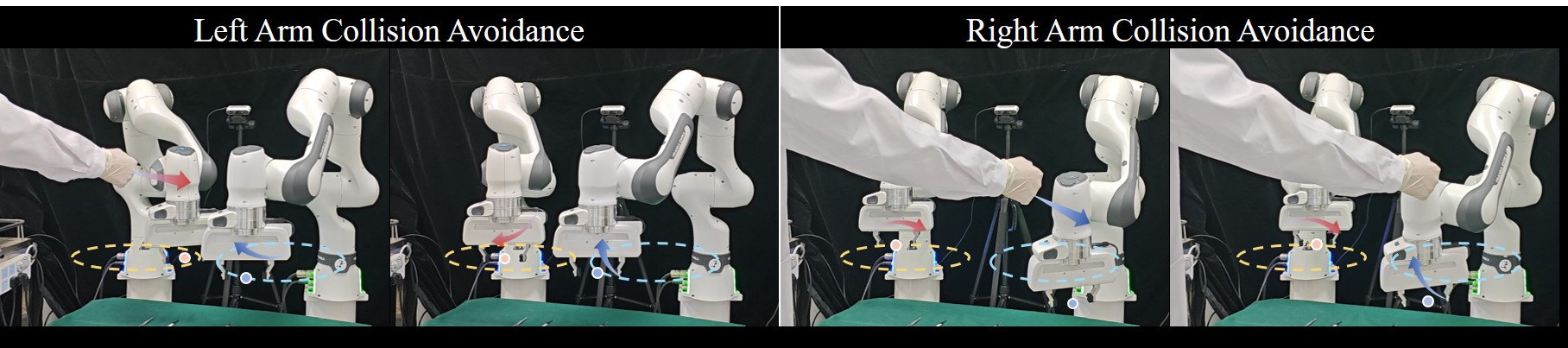
Dual-arm robot avoids obstacle and self-collision during motion. Yellow and blue ellipses represent the desired trajectories of dual-arm robot end-effector. Red/blue arrow denotes the motion direction of the left/right arm.
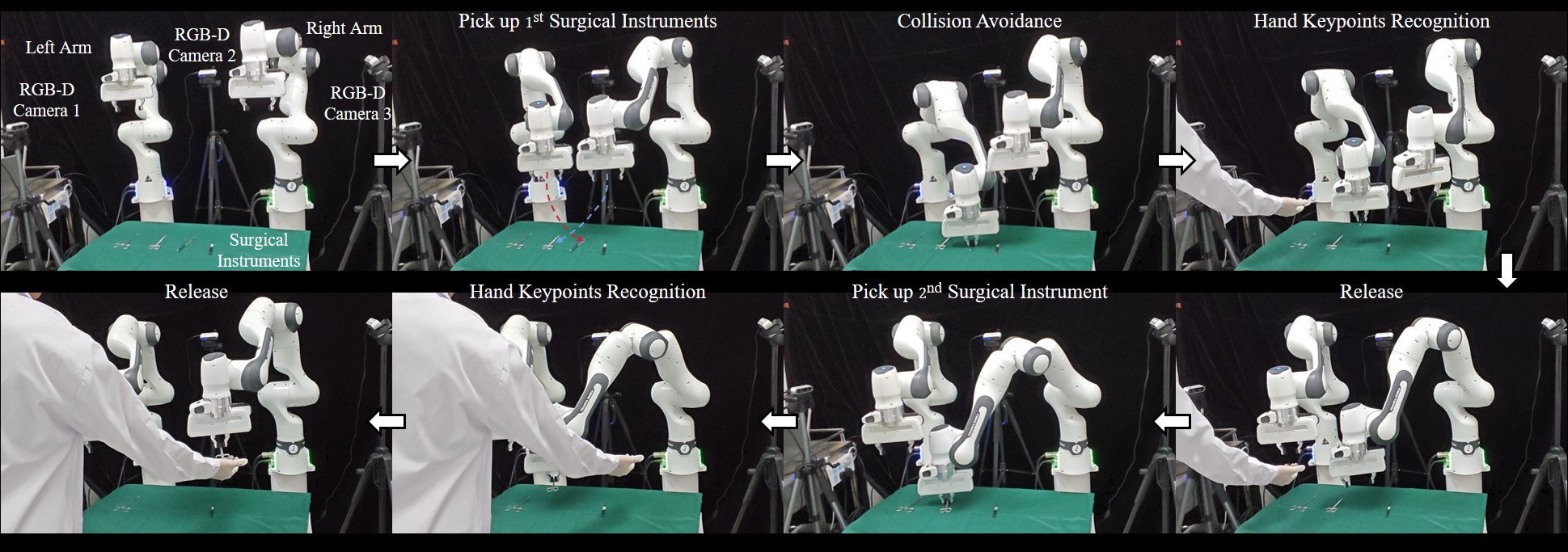
The experimental process of robot-assisted surgical instrument delivery. The dual-arm robot grasped different surgical instruments in accordance with the surgeon's instructions. The surgical instruments were then transferred to the surgeon's hand in sequence. The entire process was conducted within the proposed QP framework to prevent collisions.
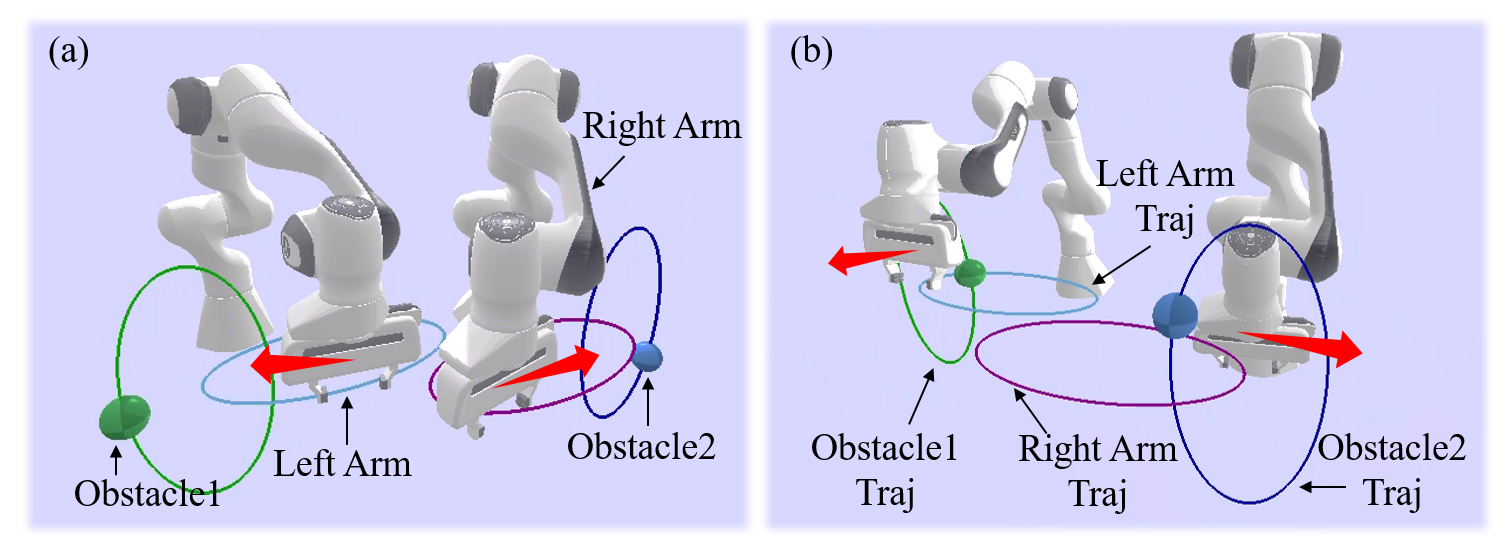
Obstacle and self-collision avoidance process of the dual-arm robot in simulation. The red arrows indicate the avoidance directions for dual-arm robot. (a) Self-collision avoidance. (b) Obstacle avoidance.
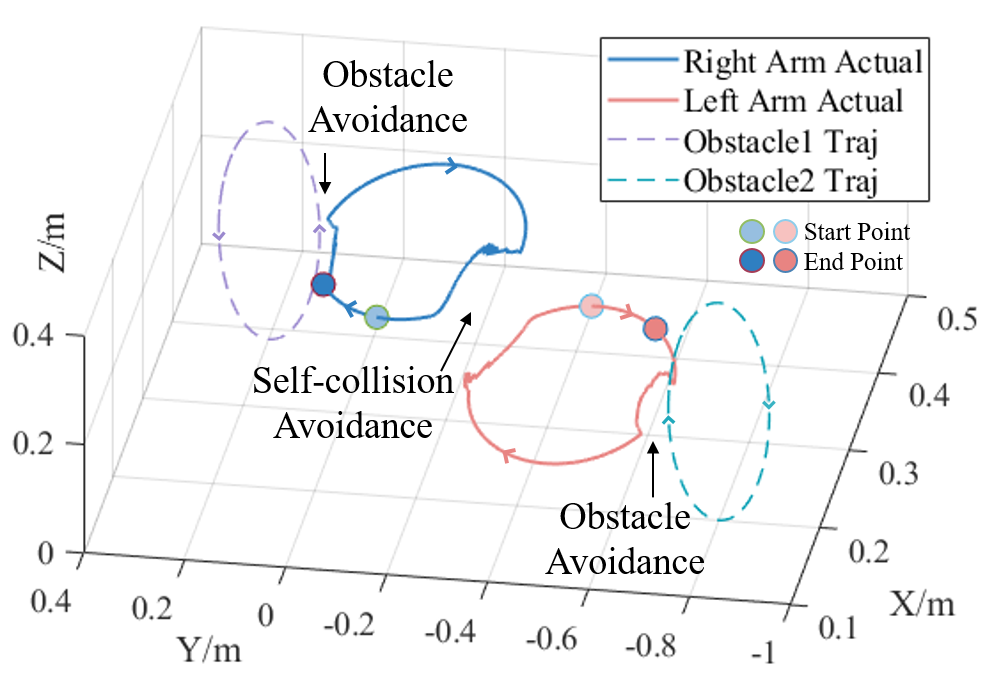
The trajectories of dual-arm robot's end-effector and obstacles during simulation. The avoidance motion is achieved by our method.
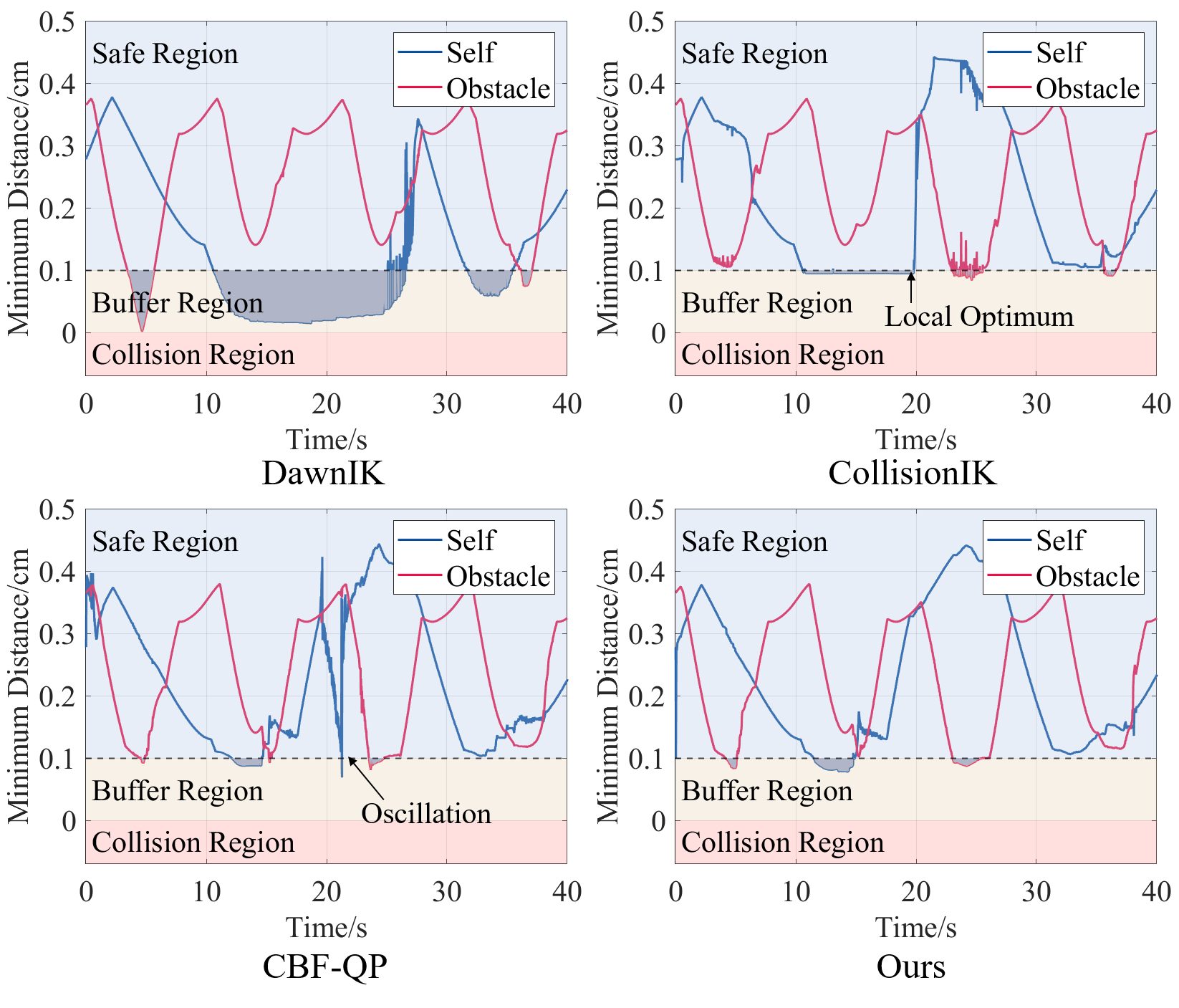
Minimum self-distance between dual arms and minimum distance between right arm and obstacle. The shadow region represents the portion where the minimum distance falls below the safety distance threshold.
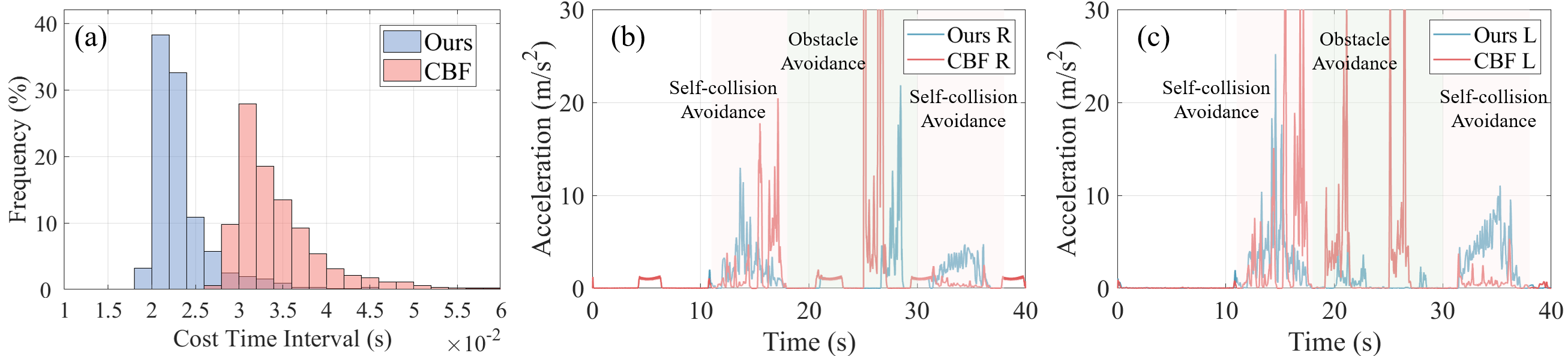
The results of the collision avoidance real-world experiment. (a) Histogram of optimization cost time. (b) Right arm end-effector's acceleration. (c) Left arm end-effector's acceleration.
BibTeX
@inproceedings{luo2026ICRA,
title={Give me scissors: Collision-Free Dual-Arm Surgical Assistive Robot for Instrument Delivery},
author={Xuejin Luo and Shiquan Sun and Runshi Zhang and Ruizhi Zhang and Junchen Wang},
year={2026},
eprint={2603.02553},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.02553},
}